A computer system may be organized in a number of different ways, which we can categorize roughly according to the number of general-purpose processors used.
· 1.3.1 Single-Processor Systems
Most systems vise a single processor. a single-processor system, there is one main CPU capable of executing a general-purpose instruction set, including instructions from user processes. Almost all systems have other special-purpose processors as well. They may come in the form of device-specific processors, such as disk, keyboard, and graphics controllers; or, on mainframes, they may come in the form of more general-purpose processors, such as I/O processors that move data rapidly among the components of the system.
All of these special-purpose processors run a limited instruction set and do not run user processes. Sometimes they are managed by the operating system, in that the operating system sends them information about their next task and monitors their status.
· 1.3.2 Multiprocessor Systems
Multiprocessor systems (also known as parallel systems or tightly coupled systems) are growing in importance. Such systems have two or more processors in close communication, sharing the computer bus and sometimes the clock, memory, and peripheral devices.
Multiprocessor systems have three main advantages:
1. Increased throughput. By increasing the number of processors, we expect to get more work done in less time. The speed-up ratio with N processors is not N, however; rather, it is less than N. When multiple processors cooperate on a task, a certain amount of overhead is incurred in keeping all the parts working correctly. This overhead, plus contention for shared
resources, lowers the expected gain from additional processors. Similarly, N programmers working closely together do not produce N times the amount of work a single programmer would produce.
2. Economy of scale. Multiprocessor systems can cost less than equivalent multiple single-processor systems, because they can share peripherals, mass storage, and power supplies. If several programs operate on the same set of data, it is cheaper to store those data on one disk and to have all the processors share them than to have many computers with local
disks and many copies of the data.
3. Increased reliability. If functions can be distributed properly among several processors, then the failure of one processor will not halt the system, only slow it down. If we have ten processors and one fails, then each of the remaining nine processors can pick up a share of the work of the failed processor. Thus, the entire system runs only 10 percent slower, rather than failing altogether.
Graceful degradation is the ability to continue providing service proportional to the level of surviving hardware.
Fault tolerant some systems go beyond graceful degradation.
The multiple-processor systems in use today are of two types.
· Asymmetric multiprocessing, which each processor is assigned a specific task.
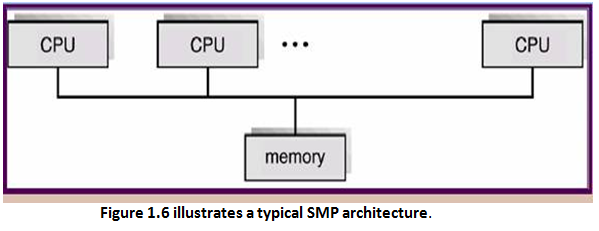
· Symmetric multiprocessing (SMP), The most common systems use in which each processor performs all tasks within the operating system.
· 1.3.1 Single-Processor Systems
Most systems vise a single processor. a single-processor system, there is one main CPU capable of executing a general-purpose instruction set, including instructions from user processes. Almost all systems have other special-purpose processors as well. They may come in the form of device-specific processors, such as disk, keyboard, and graphics controllers; or, on mainframes, they may come in the form of more general-purpose processors, such as I/O processors that move data rapidly among the components of the system.
All of these special-purpose processors run a limited instruction set and do not run user processes. Sometimes they are managed by the operating system, in that the operating system sends them information about their next task and monitors their status.
· 1.3.2 Multiprocessor Systems
Multiprocessor systems (also known as parallel systems or tightly coupled systems) are growing in importance. Such systems have two or more processors in close communication, sharing the computer bus and sometimes the clock, memory, and peripheral devices.
Multiprocessor systems have three main advantages:
1. Increased throughput. By increasing the number of processors, we expect to get more work done in less time. The speed-up ratio with N processors is not N, however; rather, it is less than N. When multiple processors cooperate on a task, a certain amount of overhead is incurred in keeping all the parts working correctly. This overhead, plus contention for shared
resources, lowers the expected gain from additional processors. Similarly, N programmers working closely together do not produce N times the amount of work a single programmer would produce.
2. Economy of scale. Multiprocessor systems can cost less than equivalent multiple single-processor systems, because they can share peripherals, mass storage, and power supplies. If several programs operate on the same set of data, it is cheaper to store those data on one disk and to have all the processors share them than to have many computers with local
disks and many copies of the data.
3. Increased reliability. If functions can be distributed properly among several processors, then the failure of one processor will not halt the system, only slow it down. If we have ten processors and one fails, then each of the remaining nine processors can pick up a share of the work of the failed processor. Thus, the entire system runs only 10 percent slower, rather than failing altogether.
Graceful degradation is the ability to continue providing service proportional to the level of surviving hardware.
Fault tolerant some systems go beyond graceful degradation.
The multiple-processor systems in use today are of two types.
· Asymmetric multiprocessing, which each processor is assigned a specific task.
· Symmetric multiprocessing (SMP), The most common systems use in which each processor performs all tasks within the operating system.
· 1.3.3 Clustered Systems
Clustered system is an another type of multiple-CPU system. Clustered systems differ from multiprocessor systems, however, in that they are composed of two or more individual systems coupled together. The definition of the term clustered is not concrete; many commercial packages wrestle with what a clustered system is and why one form is better than another. The generally accepted definition is that clustered computers share storage and are closely linked via a local-area network (LAN) or a faster interconnect such as InfiniBand.
Clustering is usually used to provide high-availability service; that is, service will continue even if one or more systems in the cluster fail. Clustering can be structured asymmetrically or symmetrically. Cluster technology is changing rapidly. Some cluster products support dozens of systems in a cluster, as well as clustered nodes that are separated by miles. Many of these improvements are made possible by storage-area networks (SANs), as described in Section 12.3.3, which allow many systems to attach to a pool of storage.
· 1.4 Operating-System Structure
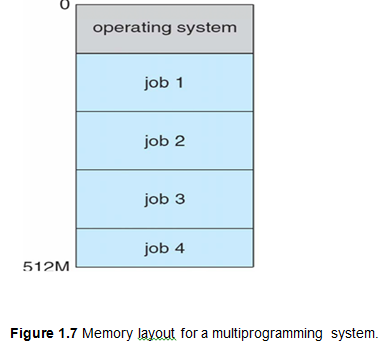
An operating system provides the environment within which programs are executed. One of the most important aspects of operating systems is the ability to multiprogram. A single user cannot, in general, keep either the CPU or the I/O devices busy at all times.
Multiprogramming increases CPU utilization by organizing jobs (code and data) so that the CPU always has one to execute. The operating system keeps several jobs in memory simultaneously (Figure 1.7).
Clustered system is an another type of multiple-CPU system. Clustered systems differ from multiprocessor systems, however, in that they are composed of two or more individual systems coupled together. The definition of the term clustered is not concrete; many commercial packages wrestle with what a clustered system is and why one form is better than another. The generally accepted definition is that clustered computers share storage and are closely linked via a local-area network (LAN) or a faster interconnect such as InfiniBand.
Clustering is usually used to provide high-availability service; that is, service will continue even if one or more systems in the cluster fail. Clustering can be structured asymmetrically or symmetrically. Cluster technology is changing rapidly. Some cluster products support dozens of systems in a cluster, as well as clustered nodes that are separated by miles. Many of these improvements are made possible by storage-area networks (SANs), as described in Section 12.3.3, which allow many systems to attach to a pool of storage.
· 1.4 Operating-System Structure
An operating system provides the environment within which programs are executed. One of the most important aspects of operating systems is the ability to multiprogram. A single user cannot, in general, keep either the CPU or the I/O devices busy at all times.
Multiprogramming increases CPU utilization by organizing jobs (code and data) so that the CPU always has one to execute. The operating system keeps several jobs in memory simultaneously (Figure 1.7).
Time sharing (or multitasking) is a logical extension of multiprogramming. In time-sharing systems, the CPU executes multiple jobs by switching among them, but the switches occur so frequently that the users can interact with each program while it is running.
Time sharing requires an interactive (or hands-on) computer system, which provides direct communication between the user and the system.
A time-shared operating system allows many users to share the computer simultaneously. A time-shared operating system uses CPU scheduling and multiprogramming to provide each user with a small portion of a time-shared computer.
1.5 Operating-System Operations
Interrupt driven is modern operating systems.
Trap (or an exception) is a software-generated interrupt caused either by an error (for example, division by zero or invalid memory access) or by a specific request from a user program that an operating-system service be performed. The interrupt-driven nature of an operating system defines that system's general structure. For each type of interrupt, separate segments of code in the operating system determine what action should be taken. An interrupt service routine is provided that is responsible for dealing with the interrupt.
Since the operating system and the users share the hardware and software resources of the computer system, we need to make sure that an error in a user program could cause problems only for the one program that was running.
· 1.5.1 Dual-Mode Operation
Two separate modes of operation: user mode and kernel mode (also called supervisor mode, system mode, or privileged mode). A bit, called the mode bit, is added to the hardware of the computer to indicate the current mode: kernel (0) or user (1).
The dual mode of operation provides us with the means for protecting the operating system from errant users—and errant users from one another.
Time sharing requires an interactive (or hands-on) computer system, which provides direct communication between the user and the system.
A time-shared operating system allows many users to share the computer simultaneously. A time-shared operating system uses CPU scheduling and multiprogramming to provide each user with a small portion of a time-shared computer.
1.5 Operating-System Operations
Interrupt driven is modern operating systems.
Trap (or an exception) is a software-generated interrupt caused either by an error (for example, division by zero or invalid memory access) or by a specific request from a user program that an operating-system service be performed. The interrupt-driven nature of an operating system defines that system's general structure. For each type of interrupt, separate segments of code in the operating system determine what action should be taken. An interrupt service routine is provided that is responsible for dealing with the interrupt.
Since the operating system and the users share the hardware and software resources of the computer system, we need to make sure that an error in a user program could cause problems only for the one program that was running.
· 1.5.1 Dual-Mode Operation
Two separate modes of operation: user mode and kernel mode (also called supervisor mode, system mode, or privileged mode). A bit, called the mode bit, is added to the hardware of the computer to indicate the current mode: kernel (0) or user (1).
The dual mode of operation provides us with the means for protecting the operating system from errant users—and errant users from one another.
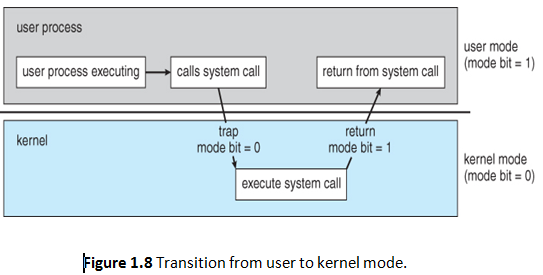
We accomplish this protection by designating some of the machine instructions that may cause harm as privileged instructions. The hardware allows privileged instructions to be executed only in kernel mode. If an attempt is made to execute a privileged instruction in user mode, the hardware does not execute the instruction but rather treats it as illegal and traps it to the operating system.
· 1.5.2 Timer
A timer can be set to interrupt the computer after a specified period. The period may be fixed (for example, 1/60 second) or variable (for example, from 1 millisecond to 1 second).
Variable timer is generally implemented by a fixed-rate clock and a counter.
The operating system sets the counter. Every time the clock ticks, the counter is decremented. We can use the timer to prevent a user program from running too long. A simple technique is to initialize a counter with the amount of time that a program is allowed to run.
· 1.5.2 Timer
A timer can be set to interrupt the computer after a specified period. The period may be fixed (for example, 1/60 second) or variable (for example, from 1 millisecond to 1 second).
Variable timer is generally implemented by a fixed-rate clock and a counter.
The operating system sets the counter. Every time the clock ticks, the counter is decremented. We can use the timer to prevent a user program from running too long. A simple technique is to initialize a counter with the amount of time that a program is allowed to run.
